極小PIRセンサモジュール [PM-2]
極小PIRセンサモジュール
[PM-2]
在庫切れ
●概要
●仕様・機能
低動作電圧小型PIRセンサー素子XC21Bを搭載した、生物が発する赤外線エネルギーの分布変化で人体を検出し、人体が近づくとON信号(Highレベル電圧)が出力されるセンサモジュールの完成品、動作電源:3.5〜15V(静止電流:0.1mA)、出力電圧レベル:Hi=3.3V、Low=0V、検知角度:100°、感知距離:0〜5米、ピンアサイン:GND、VCC、DATA、接続:2.54mmピッチ3ピン、ピンヘッダ実装済み、表記価格:1
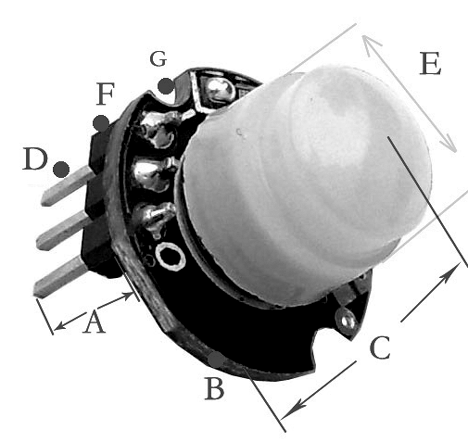
A=8、B=8、C=10、D=0.64、E=10、F=2.5、G=3(単位:mm)

(作者:根本秀介)
(1)
LCD表示のイベントをPIRセンサーに変えてみました。
ピン2はLED、ピン8にはスピーカー、ピン9にPM-2の出力で、PM-2はC1815を使ってHIGH出力を5Vに変換しています。

(2)
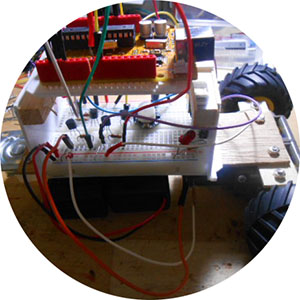
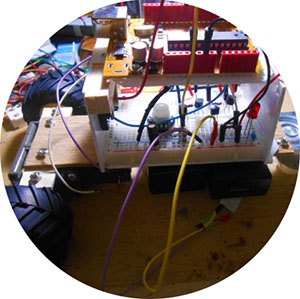
PM-2と2SC2120、びんぼうでいいのU3R利用のロボットの試作品が出来ました。
電源は、制御回路にはUSB CHARGER、モータ用には単三2本の3V電源を使用しています。
U3Rのスケッチを下記に示します。
ロボットの試し運転結果は、PM-2の感度が良すぎて、停止しなくてずっと動いたままでたまに停止するといった感じです。
今後改良しなくてはいけないです。
又、試作完成時、モーターが思ったように動かず、数回のトライアルで2SC2120のベース抵抗を1Kにするのと、スケッチの部分で
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
を追加したことで解決しました。
●仕様・機能
低動作電圧小型PIRセンサー素子XC21Bを搭載した、生物が発する赤外線エネルギーの分布変化で人体を検出し、人体が近づくとON信号(Highレベル電圧)が出力されるセンサモジュールの完成品、動作電源:3.5〜15V(静止電流:0.1mA)、出力電圧レベル:Hi=3.3V、Low=0V、検知角度:100°、感知距離:0〜5米、ピンアサイン:GND、VCC、DATA、接続:2.54mmピッチ3ピン、ピンヘッダ実装済み、表記価格:1
A=8、B=8、C=10、D=0.64、E=10、F=2.5、G=3(単位:mm)
(作者:根本秀介)
(1)
LCD表示のイベントをPIRセンサーに変えてみました。
ピン2はLED、ピン8にはスピーカー、ピン9にPM-2の出力で、PM-2はC1815を使ってHIGH出力を5Vに変換しています。
#include "LiquidCrystal.h"
char Str1[15] = "How are you?";
LiquidCrystal lcd(12, 11, 7, 6, 5, 4);
void setup()
{
lcd.begin(8, 2);
lcd.home();
lcd.clear();
digitalWrite(2, LOW);
}
void loop()
{
if (digitalRead(9) == LOW)
{
digitalWrite(2, HIGH);
tone(8, 523);
delay(800);
tone(8, 784);
delay(800);
tone(8, 880);
delay(800);
tone(8, 784);
delay(800);
noTone(8);
int i=0;
lcd.home();
lcd.clear();
while(i < 12)
{
if (i<8)
{
lcd.print(Str1[i]);
++i;
}
else
{
lcd.setCursor(i-8,1);
lcd.print(Str1[i]);
++i;
}
}
delay(5000);
lcd.clear();
digitalWrite(2, LOW);
}
}(2)
PM-2と2SC2120、びんぼうでいいのU3R利用のロボットの試作品が出来ました。
電源は、制御回路にはUSB CHARGER、モータ用には単三2本の3V電源を使用しています。
U3Rのスケッチを下記に示します。
ロボットの試し運転結果は、PM-2の感度が良すぎて、停止しなくてずっと動いたままでたまに停止するといった感じです。
今後改良しなくてはいけないです。
又、試作完成時、モーターが思ったように動かず、数回のトライアルで2SC2120のベース抵抗を1Kにするのと、スケッチの部分で
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
を追加したことで解決しました。
//pin 2 : LED
//pin 3 : MOTOR l
//pin 4 : MOTOR r
//pin 8 : speaker
//pin 9 : pir(PM-2)
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, INPUT);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
}
void loop()
{
if (digitalRead(9) == LOW)
{
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
tone(8, 784);
delay(1000);
tone(8, 659);
delay(1000);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
tone(8, 698);
delay(1000);
tone(8, 587);
delay(1000);
noTone(8);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
}
}